Laser Guided Vehicle Using Matlab

Pdf Investigation Of Matlab R As Platform In Navigation And Control Of An Automatic Guided Vehicle Utilising An Omnivision Sensor

Apps Development Pinwire E Tc Engineer 3 Resume Format Pinterest Sample Resum Engineering Resume Mechanical Engineer Resume Engineering Resume Templates
Laser Guided Vehicle On Navigation Using Two Synchronized Lasers Ece Eee Final Year Projects
208114036 L Aser Guided Robo

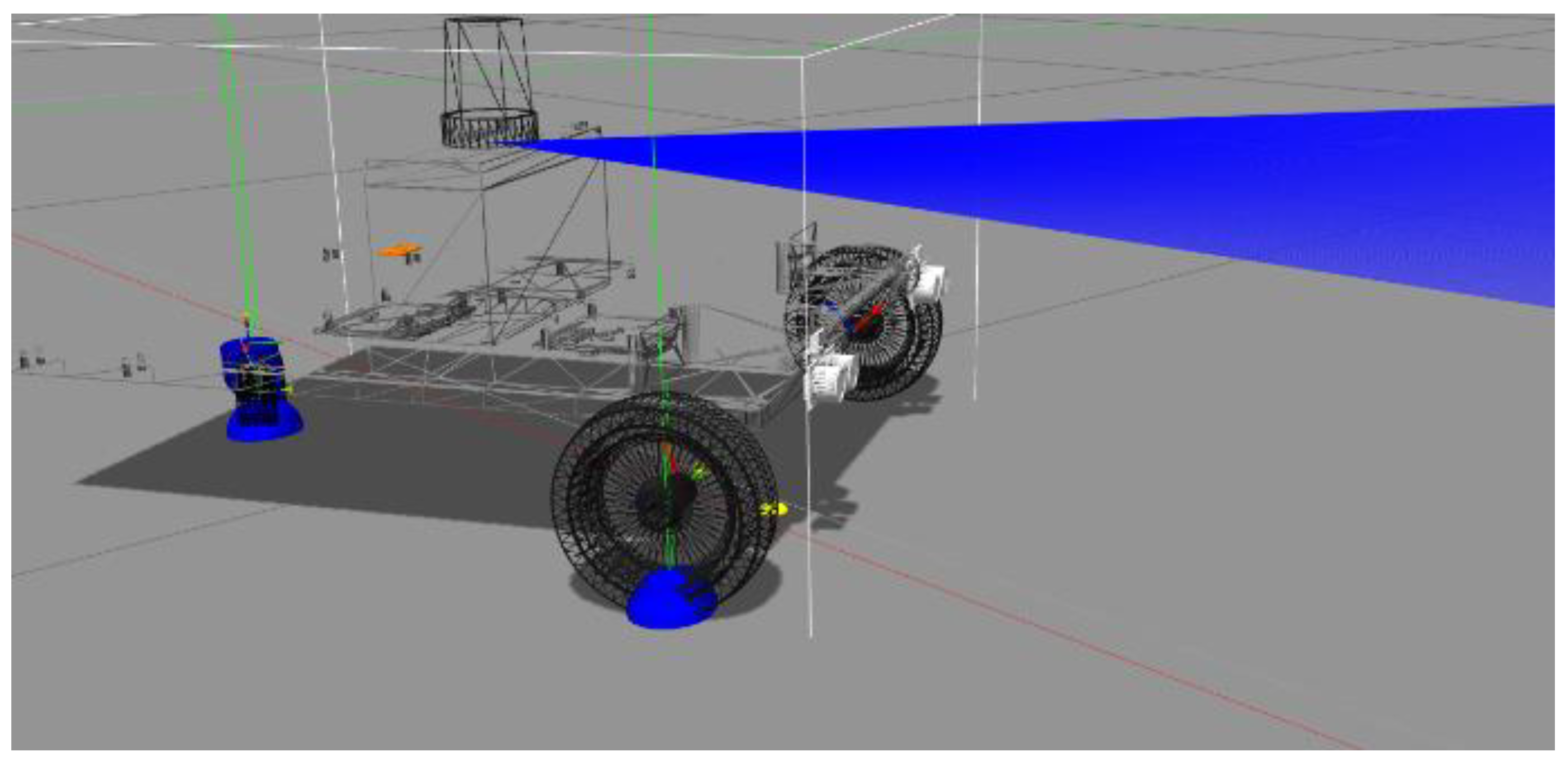
Simulating Trajectories For Remote Handling Vehicles Carrying Activated Components Matlab Simulink
4iwmgpw Mjkaim

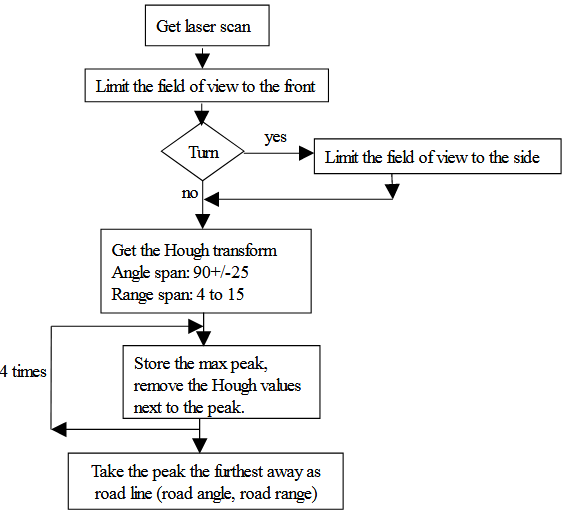
The work done in this master thesis concerns laser guided vehicles and more specifically the autonomous navigation by following the edge of a road.
Laser guided vehicle using matlab.

Development Of A Vision Navigation System With Fuzzy Control Algorithm For Automated Guided Vehicle Semantic Scholar
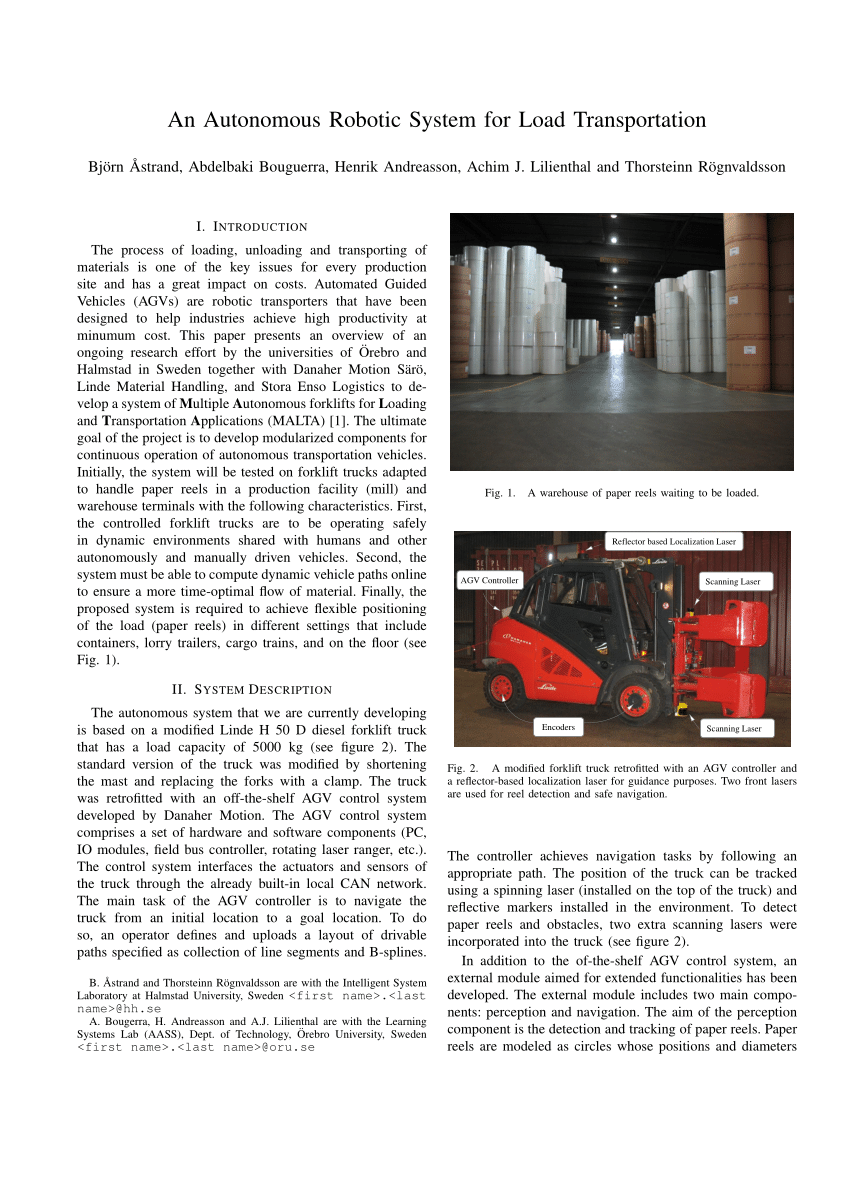
A Modified Forklift Truck Retrofitted With An Agv Controller And A Download Scientific Diagram

Automatic Guidance Of Underground Mining Vehicles Using Laser Sensors Sciencedirect

Pdf High Precision Psd Guided Robot Localization Design Mapping And Position Control
Machines Free Full Text Unmanned Ground Vehicle Modelling In Gazebo Ros Based Environments Html

Building A Magnetic Track Guided Agv
Active Lowpassfilter Circuit Is A Filter That Passes Signals With A Frequency Lower Than A Certain Cutoff Frequency Circuit Design Filters Circuit

Identifying Vehicle Number Plates Using Matlab

Solution Manual For Matlab Programming For Engineers 5th Edition By Chapman Instant Download Library Test Bank And Solutions Engineering Solutions Test Bank
Pdf A Review On Design Navigation Techniques Of Automated Guided Vehicles Systems Agvs

Arc Path Tracking Algorithm Of Dual Differential Driving Automated Guided Vehicle Semantic Scholar
Pdf Path Planning Of Mobile Robot For Autonomous Navigation Of Road Roundabout Intersection

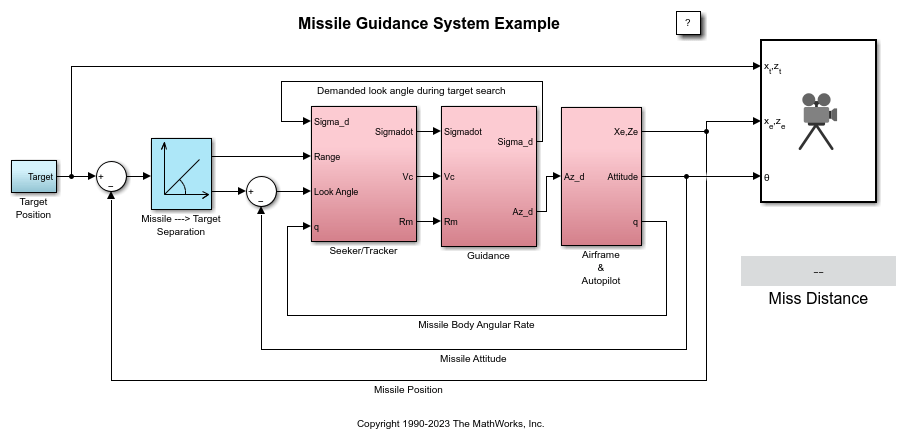
Pdf Design And Application Of A Lead Compensator To A Guided Missile Control System
Pdf Agv Trajectory Control Based On Laser Sensor Navigation
Source : pinterest.com
